 时间:
时间: 作者: 成功案例
作者: 成功案例码垛 B:包含码垛B(单途径形式)和码垛BX(多途径形式) 适用于工件姿态稳定,堆叠时的底面形状为直线或四角形。码垛 E:包含码垛E(单途径形式)和码垛EX(多途径形式)
(1)码垛指令格局:码垛指令依据码垛寄存器的值,依据堆叠形式核算当时 的堆叠点方位,并依据途径形式核算当时的途径,改写码垛动作指令的方位 数据。

(2)码垛动作指令:以使用具有趋近点、堆叠点、回退点的途径点作为方位 数据的动作指令,是码垛专用的动作指令。该方位数据经过码垛指令每次都 被改写。
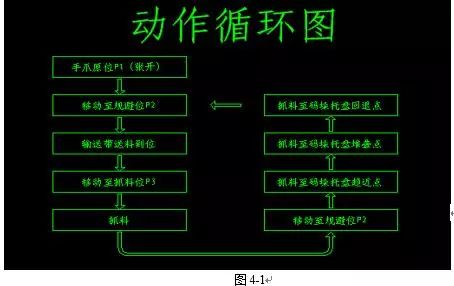
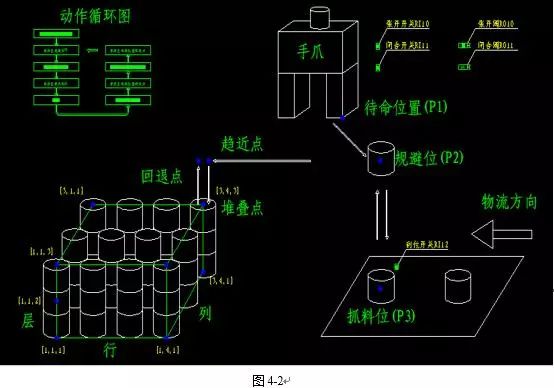
如图 4-1、4-2 所示动作循环,在输送带 P3 进行工件抓取,在托盘上进行 码垛。
(3) 码垛功用,在三个指令也即码垛指令、码垛动作指令、码垛完毕指令 存在于一个程序而发挥作用。即便只将一个指令复制到子程序中进行示教,该功用也不会正常作业,应留意。
(4) 码垛编号,在示教完码垛的数据后,伴随码垛指令、码垛动作指令、 码垛完毕指令一同被主动写入。不需要介意是否在其他程序中重复使 用着码垛编号(每个程序都具有该码垛编号的数据)。

